
農(nóng)業(yè)模擬器:用智能技術打通黑土地保護的數(shù)據(jù)流
|
|
中國網(wǎng)/中國發(fā)展門戶網(wǎng)訊 黑土地作為大自然饋贈給人類的天然寶藏,是最適合作物生長的土壤。人們常用“一兩黑土二兩油”來形容其肥沃與珍貴。與黃土、紅土等類型的土壤相比,肥沃是黑土地得天獨厚的優(yōu)勢;然而,土壤結構一旦遭到破壞其不可逆轉性特征又成為黑土地天生的缺陷。因此,如何合理利用黑土地并確保黑土理化結構不被破壞,是困擾全球科學家的難題;平衡黑土地“用好”和“養(yǎng)好”之間的關系是黑土地保護的關鍵。
從全球黑土地四大分布區(qū)域的發(fā)展歷史來看,都經(jīng)歷了開發(fā)、利用、破壞和保護?4?個過程。從黑土地的保護措施所積累的有效性經(jīng)驗來看:美國利用先進的農(nóng)機具走上了實現(xiàn)保護性耕作的道路,并且誕生了約翰迪爾(John Deere)、孟山都(Monsanto)等世界級農(nóng)業(yè)科技巨頭;烏克蘭則由于地廣人稀,具備大面積開展土地和耕作輪休的條件,因此其通過徹底的休息實現(xiàn)黑土地的保護;阿根廷是目前全球黑土地保護性耕作的實踐者,在機械化的基礎上,全面實現(xiàn)免耕播種、條帶播種、秸稈還田和等高種植的耕作方式。
從國外的經(jīng)驗來看,結合全球糧食安全的大背景,我國的黑土地保護必須立足“用好”。“用好”除了要重視土壤、微生物等基礎機理的研究外,還需要利用專用農(nóng)業(yè)機械裝備及信息化手段進行保護性耕作,即:在利用專用智能化農(nóng)業(yè)機械裝備基礎上,通過信息化和智能化手段,科學評價保護性耕作的效果,并給出科學的作業(yè)指導與建議。農(nóng)業(yè)信息技術先后經(jīng)歷了從農(nóng)業(yè)專家系統(tǒng),到農(nóng)業(yè)數(shù)字化、農(nóng)業(yè)信息化,再到基于大數(shù)據(jù)的農(nóng)業(yè)智能化的多階段發(fā)展與技術積累,信息技術已經(jīng)成為推動農(nóng)業(yè)生產(chǎn)力發(fā)展的核心驅動力,從而為黑土地保護性應用提供科學的決策依據(jù)打下了技術基礎。
黑土地保護急需體系化信息系統(tǒng)的支撐
在農(nóng)業(yè)信息技術領域,我國早在?20?世紀?80?年代就已借鑒了數(shù)字化技術在工業(yè)生產(chǎn)中的應用經(jīng)驗,開始發(fā)展農(nóng)業(yè)信息管理系統(tǒng)(MIS),在農(nóng)業(yè)生產(chǎn)的物資管理等方面起到了作用。20?世紀?90?年代初,農(nóng)業(yè)專家系統(tǒng)進一步借助計算機技術的發(fā)展,為農(nóng)業(yè)生產(chǎn)提供信息化的指導,并推廣和普及了更多的先進農(nóng)業(yè)科技。21?世紀初,在互聯(lián)網(wǎng)浪潮的推動下,“互聯(lián)網(wǎng)+農(nóng)業(yè)”的概念風起云涌,多樣化的物聯(lián)網(wǎng)(IoT)種類、豐富的移動終端應用提升了農(nóng)業(yè)各個生產(chǎn)環(huán)節(jié)的數(shù)字化水平。近年來,隨著物聯(lián)網(wǎng)的廣泛應用,以及大數(shù)據(jù)技術的興起,依靠大數(shù)據(jù)的人工智能技術開始快速滲透到農(nóng)業(yè)領域,并對農(nóng)業(yè)科技的發(fā)展起到了巨大的推動作用。
但是,我國農(nóng)業(yè)信息技術總體上仍然較為落后,難以滿足黑土地保護性作業(yè)的需求,具體表現(xiàn)在?3?個方面。
缺乏完善的數(shù)據(jù)采集體系,黑土地家底不清。國內(nèi)并不缺少針對土壤信息數(shù)據(jù)采集技術的研發(fā),無論是傳感器技術還是衛(wèi)星遙感技術,都投入了大量的研發(fā)力量;但不同數(shù)據(jù)采集手段之間無法形成體系,難以全面反應黑土地的資源情況。以高分系列遙感衛(wèi)星為例,由于缺乏其他數(shù)據(jù)樣本的驗證,目前其遙感數(shù)據(jù)無法全面、準確地反應黑土地有機質(zhì)的演變情況。
缺少基礎模型與算法,難以支撐黑土地的作業(yè)決策。科學作業(yè)決策的核心是模型與算法,但我國在農(nóng)業(yè)算法與模型領域嚴重落后。美國的農(nóng)業(yè)技術轉移決策支持系統(tǒng)(DSSAT)模型擁有超過?30?年的研發(fā)歷史,已成為世界農(nóng)學研究中模擬實驗的主要模型之一,而我國的農(nóng)學研究中也大量使用?DSSAT。但是,DSSAT?的核心模型主要以美國的氣候與土壤條件為基礎,并不適用于我國——只能應用于研究模擬,無法應用于實際生產(chǎn)過程。缺乏自主的模型與算法是導致我國黑土地的演變機理不清、無法進行科學決策作業(yè)的核心原因之一。
農(nóng)機智能化水平低,黑土地保護性作業(yè)過程無機可用。以免耕播種為例,免耕播種是保護性耕作中最常見也是最關鍵的技術之一。但是,目前免耕播種機使用過程中存在機具調(diào)整技術難度大、全量秸稈覆蓋還田情況下通過性能較差、播種質(zhì)量及作業(yè)速度不高等問題,這都需要采用智能化、自動化最新技術來升級完善。
要解決上述問題,必須以系統(tǒng)化的思維,采用自頂向下的設計模式,構建成體系的信息系統(tǒng),以滿足黑土地保護的信息化需求。實際上,農(nóng)業(yè)生產(chǎn)過程的數(shù)據(jù)流向是一個“數(shù)據(jù)采集、狀態(tài)判斷、作業(yè)決策與作業(yè)執(zhí)行”的過程,與軍事作戰(zhàn)領域中的?OODA(觀察—判斷—決策—執(zhí)行)理論非常相似。基于此,中國科學院計算技術研究所提出了基于智能?OODA?環(huán)打通數(shù)據(jù)流的農(nóng)業(yè)模擬器思路,并在黑土地保護專項中進行了先期實踐。
農(nóng)業(yè)生產(chǎn)的智能?OODA?環(huán)
OODA?理論最早提出于軍事領域,是由美國軍事戰(zhàn)略家約翰?·?博伊德(John Boyd)開發(fā)的一種工具——用于解釋個人和組織如何在不確定和混亂的環(huán)境中獲勝[6]。OODA?循環(huán)模型是“觀察”(observe)、“判斷”(orient)、“決策”(decide)、“執(zhí)行”(act)循環(huán)的縮寫,最初被稱為“Boyd?循環(huán)”。OODA?循環(huán)模型在戰(zhàn)術方面是對“空對空”交戰(zhàn)的描述,是根據(jù)參戰(zhàn)對象自己的戰(zhàn)略環(huán)境在不斷進化中調(diào)整戰(zhàn)略的手段——它是一個有機的模型,而不是一個機械的模型。
在大多系統(tǒng)動態(tài)運作的應用場景中,執(zhí)行器與傳感器協(xié)同和所處環(huán)境進行信息交互,其動態(tài)交互過程符合?OODA?循環(huán)模型:應用系統(tǒng)通過傳感器對目標對象進行“觀察”,采集相關信息;根據(jù)應用需求,對后續(xù)決策處理的目標和原則進行“判斷”,同時準備決策所需數(shù)據(jù)集,對采集的數(shù)據(jù)進行預處理,并進行初步分析;按照應用決策處理的目標和原則對數(shù)據(jù)綜合分析及“決策”,并提出優(yōu)化控制策略;執(zhí)行器(也稱為反應器)與物理系統(tǒng)或環(huán)境進行交互,接收信號并將信號轉化為一種物理行為,最終通過“執(zhí)行”優(yōu)化控制策略、改變目標對象相關狀態(tài),從而改變系統(tǒng)狀態(tài)。在系統(tǒng)狀態(tài)改變后,利用反饋機制,系統(tǒng)通過傳感器觀察新狀態(tài)下的相關參數(shù),并不斷重復?OODA?的動態(tài)循環(huán)過程(圖?1)。
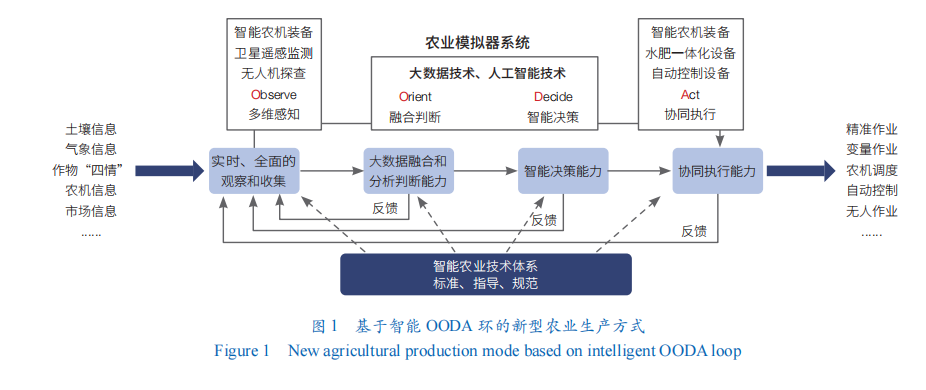
基于智能?OODA?環(huán)的新型農(nóng)業(yè)生產(chǎn)方式,同樣可分為多維感知、融合處理、智能決策和協(xié)同執(zhí)行?4?個部分,并引入智能技術提高這?4?個階段的數(shù)據(jù)采集與決策精度;在智慧農(nóng)業(yè)技術體系標準和規(guī)范的指導下,將信息作為農(nóng)業(yè)生產(chǎn)要素,用現(xiàn)代信息技術對農(nóng)業(yè)對象、環(huán)境和耕作全過程進行可視化表達、數(shù)字化設計、信息化管理。具體步驟為:對土壤、氣象、水文、作物“四情”(墑情、苗情、蟲情、災情),以及農(nóng)機乃至市場等信息進行實時全面的觀察和收集;對所有采集數(shù)據(jù)進行統(tǒng)一的數(shù)據(jù)處理和分析,并對應不同的農(nóng)業(yè)模型與算法得到具體的作業(yè)命令;通過智能農(nóng)機和自動化裝置實現(xiàn)精準、高效的作業(yè),同時實時監(jiān)測信息處理、決策和執(zhí)行過程中整個系統(tǒng)的變化,并不斷修正模型達到最優(yōu)化的效果。
農(nóng)業(yè)模擬器的功能與架構
相較于大氣物理和新型材料等重大戰(zhàn)略領域科學,傳統(tǒng)農(nóng)業(yè)科學的發(fā)展較多依賴經(jīng)驗和簡單統(tǒng)計的建模,而與計算建模的結合相對較弱,直接制約了農(nóng)業(yè)科學現(xiàn)代化的發(fā)展。尤其是在智能化時代,農(nóng)業(yè)領域數(shù)據(jù)積累不足,計算建模方法缺乏,使得知識挖掘不充分。因此,智能農(nóng)業(yè)要解決的首要問題是農(nóng)業(yè)科學的計算建模。鑒于其他學科的經(jīng)驗,發(fā)展可計算的模型和模擬系統(tǒng)是行之有效的技術途徑。然而,不同于物理學、化學等領域較為單純的科學發(fā)現(xiàn)活動,農(nóng)業(yè)是一個與生產(chǎn)過程緊密聯(lián)系的科研實踐活動。因此,亟待構建基于新建模范式的農(nóng)業(yè)模擬器系統(tǒng),實現(xiàn)人工模擬系統(tǒng)和真實生產(chǎn)系統(tǒng)的在線迭代平臺。
第五范式建模
人類從事科學研究的范式一直在隨著技術的進步而演變。到目前為止,現(xiàn)代科學活動中存在?4?種研究范式:第一范式是實驗觀察,發(fā)現(xiàn)客觀存在的自然現(xiàn)象,如可以從實驗得到的晶體結構;第二范式是理論研究,通過理論推導歸納出一般性的規(guī)律,形成對客觀世界認識探索的理論體系,如第一性原理、牛頓力學的提出;第三范式是數(shù)值模擬,這是近現(xiàn)代科學研究借助強大的計算工具形成的方法,如在高性能計算機系統(tǒng)上運用第一性原理計算產(chǎn)生高精度的各種構型數(shù)據(jù);第四范式是大數(shù)據(jù)分析,通過積累的大量已知數(shù)據(jù),然后通過計算得出相關關系。
上述?4?種科研范式中,實驗研究和理論分析在實踐活動中分離,沒有涉及生產(chǎn)過程迭代建模。第五范式是把理論研究和實驗科學通過“數(shù)值+數(shù)據(jù)+智能”技術耦合成一個在線迭代的有機整體,形成“理論+實驗”科學活動的“自動駕駛系統(tǒng)”。智能農(nóng)業(yè)模擬器與傳統(tǒng)農(nóng)業(yè)信息系統(tǒng)及?DSSAT、WOFOST?等第四范式的典型農(nóng)學模擬系統(tǒng)不同,具體體現(xiàn)在?2?個方面。
模型研制方面。WOFOST?模型是在歐洲生產(chǎn)模型基礎上研制而來,著重強調(diào)其在定量評價土地生產(chǎn)力、區(qū)域產(chǎn)量預報、風險分析和年際間產(chǎn)量變化及氣候變化影響量化等研究中的應用。DSSAT?模型則是在借鑒歐洲模型的基礎上,結合美國農(nóng)業(yè)特點所研制的模型。該模型匯總了各種作物生長模型和標準化模型的輸入、輸出變量格式,方便模型的普及和應用。上述?2?種模型都屬于國外農(nóng)業(yè)模型并得到廣泛應用。到目前為止,我國開展的作物模型研究仍以引進并使用國外作物模型為主,或在國外作物模型的基礎上進行修改或簡化,真正自主研發(fā)并得到廣泛使用的作物模型為數(shù)較少。智能農(nóng)業(yè)模擬器則是我國獨立自主研發(fā)的農(nóng)業(yè)軟件,這使得我國農(nóng)業(yè)生產(chǎn)模型方面將不再受到西方國家的制約。
功能方面。WOFOST?是多種作物的普適性模型,主要適用光合作用、呼吸作用、蒸騰作用、干物質(zhì)生成與分配、作物生育進程、根系生長分布、土壤水分狀況。該模型可以針對?3?種不同的生產(chǎn)過程模擬作物生長變化過程,即模擬潛在作物生長、水分限制條件下的作物生長和養(yǎng)分限制條件下的作物生長。DSSAT?是一種針對特定作物的模型,如大豆、玉米、高粱等作物;該模型兼容了許多作物生長模型,構成“作物系統(tǒng)模型”軟件包,然后應用公共的土壤水分運動模型和土壤碳氮模型,能夠模擬不同作物和作業(yè)地的生產(chǎn)過程。然而,上述?2?種模型都存在一些問題:輸出結果受到輸入數(shù)據(jù)影響。例如,試驗區(qū)氣象數(shù)據(jù)、土壤數(shù)據(jù)、作物品種數(shù)據(jù)等對結果影響較大;對歷年來的數(shù)據(jù)收集難度較大,在運行時缺失的數(shù)據(jù)只能按缺省值處理,對結果的輸出也會產(chǎn)生一定的影響。模型應用需要根據(jù)實際情況進行調(diào)整,需要對源代碼進行修改。數(shù)據(jù)不夠全面。如,缺少氣象數(shù)據(jù)、光譜數(shù)據(jù)等。模型中缺乏病蟲害等因素的考慮可能導致數(shù)據(jù)不準確。智能農(nóng)業(yè)模擬器基于更加完備的數(shù)據(jù)采集系統(tǒng),將輸入與輸出進行解耦;然后,通過邊緣計算對農(nóng)業(yè)生產(chǎn)實時數(shù)據(jù)進行處理,結合科學的指導意見完成決策反饋,從而指導農(nóng)業(yè)作業(yè)生產(chǎn)。
因此,智能農(nóng)業(yè)模擬器通過人工模擬系統(tǒng)與真實生產(chǎn)系統(tǒng)的在線迭代,推動科學家的理論研究與生產(chǎn)實際系統(tǒng)的相互促進,以實現(xiàn)實驗室模型和算法與生產(chǎn)一線的指揮系統(tǒng)“在線連接”,進而令農(nóng)業(yè)生產(chǎn)實現(xiàn)“自動化”,最終達到提高作業(yè)效率與農(nóng)業(yè)產(chǎn)量、降低生產(chǎn)成本的目的。
農(nóng)業(yè)模擬器的體系結構
基于智能?OODA?環(huán)是第五范式建模的有效實踐途徑之一,農(nóng)業(yè)模擬器應包含?4?個主要階段。
觀察——農(nóng)業(yè)全要素數(shù)據(jù)采集、存儲標準體系。農(nóng)學基本上是一門以數(shù)據(jù)積累、統(tǒng)計建模為基礎的學科,數(shù)據(jù)在其學科發(fā)展中擁有至關重要的作用。因此,在農(nóng)業(yè)模擬及農(nóng)業(yè)生產(chǎn)決策必須建立在數(shù)據(jù)的基礎上,在傳統(tǒng)的農(nóng)業(yè)模擬系統(tǒng)(如?DSSAT、WOFOST)應用中,其使用的大量基礎模型(如?CERES-Maize、CERES-Wheat?等作物生長預測模型)均是建立在數(shù)據(jù)統(tǒng)計基礎上。農(nóng)業(yè)模擬器“在線連接”的屬性決定了其必須對農(nóng)業(yè)生產(chǎn)過程中的數(shù)據(jù)進行在線監(jiān)控;而上述模型所采用的基于歷史數(shù)據(jù)作為系統(tǒng)輸入的模式無法滿足農(nóng)業(yè)模擬器的廣域大粒度和實時在線模擬需求,這就決定了必須采用各種數(shù)據(jù)采集技術(如遙感、探地雷達、傳感器等)對農(nóng)業(yè)生產(chǎn)過程中的全要素進行全面的數(shù)據(jù)采集。同時,農(nóng)業(yè)模擬器的“廣域”特性也決定了農(nóng)業(yè)數(shù)據(jù)采集過程具備高并發(fā)、高通量特性,而農(nóng)業(yè)生產(chǎn)的重點區(qū)域(如我國黑土地分布的東北地區(qū))存在大量的公眾服務網(wǎng)絡覆蓋不足的問題,也對數(shù)據(jù)的實時采集帶來了挑戰(zhàn)。針對上述問題,農(nóng)業(yè)模擬器的設計必須是完全面向農(nóng)業(yè)生產(chǎn)過程的數(shù)據(jù)采集、存儲與交換體系,以此更好地解決農(nóng)業(yè)模擬數(shù)據(jù)來源的問題。
判斷——構建農(nóng)業(yè)全要素狀態(tài)判斷與演變模型。對農(nóng)業(yè)生產(chǎn)過程中不同要素(如作物健康狀態(tài)、土壤健康狀態(tài)等)作出定性與定量分析,并預測其狀態(tài)演變是作業(yè)決策的基礎。農(nóng)學領域針對此已存在大量的研究,如表型鑒定、脅迫模型、蒸騰模型、土壤侵蝕演變等。但從目前來看,這些研究仍存在一定的局限性,主要體現(xiàn)為數(shù)據(jù)來源受限、以環(huán)境變化均質(zhì)為前提等。這使得每種模型不具備廣域條件下的普適性,一旦目標環(huán)境與模型自身構建所處的環(huán)境間存在較大偏差時,要么無法適用,要么需要花費大量的時間重新進行校正。因此,對農(nóng)業(yè)模擬器而言,需要在現(xiàn)有模型的基礎上,通過大數(shù)據(jù)技術和人工智能技術,自動修正已有模型或構建新的模型,以實現(xiàn)廣域農(nóng)業(yè)生產(chǎn)過程中的實時在線判斷。
決策——研究基于農(nóng)業(yè)生產(chǎn)全要素的生產(chǎn)決策方法。農(nóng)業(yè)生產(chǎn)決策是根據(jù)生產(chǎn)要素的狀態(tài)給出對應的作業(yè)決策。例如,決定種子、農(nóng)藥、化肥的使用量,決定追肥時機,決定灌溉時機與用水量等。對此,農(nóng)業(yè)模擬器需要解決的核心問題包括?2?個方面:農(nóng)藝知識體系的數(shù)字化,即利用現(xiàn)有的農(nóng)藝知識體系構建農(nóng)業(yè)生產(chǎn)決策的基礎算法與模型;結合生產(chǎn)過程,實現(xiàn)對算法與模型的修正,構建完整“數(shù)據(jù)—模型”的閉環(huán)模型,以實現(xiàn)決策算法與模型的自進化。解決上述問題的技術路徑,需要利用知識圖譜、知識發(fā)現(xiàn)等知識工程領域技術,以實現(xiàn)對農(nóng)藝知識的挖掘和數(shù)字化,并進而利用大數(shù)據(jù)技術、人工智能技術等方法進行對模型的在線修正或者二次建模。
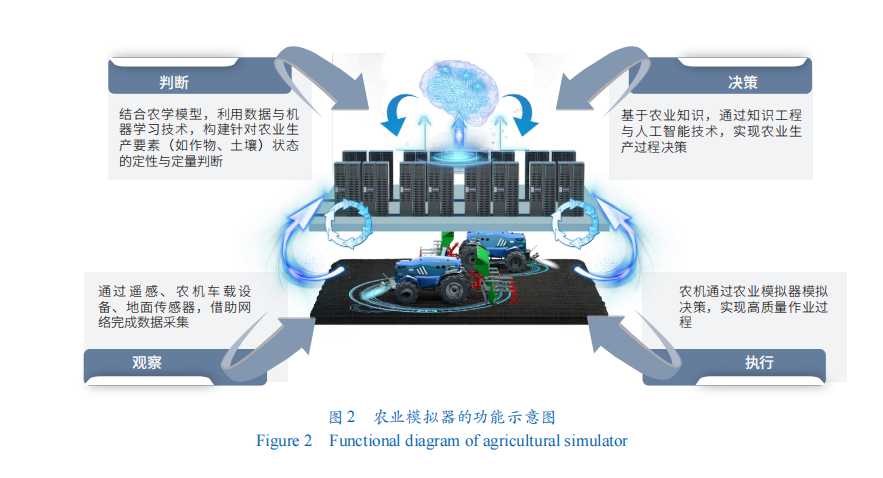
執(zhí)行——突破農(nóng)機裝備的智能作業(yè)控制與執(zhí)行技術。作為基于智能?OODA?環(huán)的農(nóng)業(yè)模擬器的最后一環(huán),該階段是理論與實驗結合最為密切并明顯區(qū)分于其他范式建模的關鍵所在。在農(nóng)業(yè)生產(chǎn)過程中,決策產(chǎn)生的作業(yè)方案通過智能化農(nóng)機裝備進行高質(zhì)量的作業(yè),并在作業(yè)過程中通過多樣化傳感器設備進行實時的數(shù)據(jù)采集,最終形成“觀察—判斷—決策—執(zhí)行”的?OODA?閉環(huán),以此打通實驗室模型和算法與生產(chǎn)一線的指揮系統(tǒng)“在線連接”,實現(xiàn)農(nóng)業(yè)模擬器不斷演進。此外,自動化作業(yè)執(zhí)行可以有效規(guī)避人工作業(yè)帶來的作業(yè)質(zhì)量不達標問題,進而降低農(nóng)業(yè)模擬器的數(shù)據(jù)誤差。要實現(xiàn)農(nóng)機裝備的智能作業(yè)控制與執(zhí)行,需要針對無人駕駛裝備系統(tǒng)、整機電子系統(tǒng)、作業(yè)機具的精準控制、動力系統(tǒng)與作業(yè)機具的協(xié)同控制等方向進行深入研究,形成智能?OODA?環(huán)需要的成套作業(yè)裝備(圖?2)。
農(nóng)業(yè)模擬器的軟硬件系統(tǒng)
針對上述過程,農(nóng)業(yè)模擬器的軟硬件構成應該主要包括?3?個方面。
空天地一體化的農(nóng)業(yè)生產(chǎn)數(shù)據(jù)觀測網(wǎng)絡。該網(wǎng)絡對應于智能?OODA?環(huán)中的“觀察”環(huán)節(jié)。在地面,通過各種傳感器設備、氣象站設備完成土壤、環(huán)境、氣候信息的采集,通過遙感、伽馬輻射接收、無人機載多光譜/高光譜等設備實現(xiàn)對土壤、作物、水肥信息的采集。在空中,在利用通導遙一體的衛(wèi)星系統(tǒng)提供遙感數(shù)據(jù)的同時,解決農(nóng)業(yè)數(shù)據(jù)回傳與控制指令下發(fā)所需要的廣域通信覆蓋問題,以及農(nóng)機裝備自動執(zhí)行過程中的高精度定位問題。觀測網(wǎng)絡應當具備海量?IoT?傳感器的并發(fā)接入能力,以支撐農(nóng)業(yè)生產(chǎn)過程中大量部署的傳感器通過?IoT?網(wǎng)絡實現(xiàn)數(shù)據(jù)的回傳。
邊緣計算平臺。邊緣計算系統(tǒng)用于“判斷”與“執(zhí)行”2?個環(huán)節(jié)的計算支撐。邊緣計算平臺為農(nóng)業(yè)生產(chǎn)過程中小粒度實時在線判斷提供計算支撐。例如,作物的病蟲害識別一般通過近距離的圖像識別方法進行處理,此類“判斷”模型需要在服務端利用平臺進行大量訓練;模型訓練完成后可以在邊緣計算平臺端實現(xiàn)實時判斷,進而降低數(shù)據(jù)回傳至云服務端所產(chǎn)生的時延,以此提高決策的時效性。針對“執(zhí)行”過程,邊緣計算平臺就近為無人駕駛、機具作業(yè)控制提供基礎計算能力,以滿足農(nóng)機在此過程中的智能執(zhí)行需求。
多樣化算力中心。多樣化算力中心是農(nóng)業(yè)模擬器系統(tǒng)的核心組件,是“大腦”,其為農(nóng)業(yè)?OODA過程中的“觀察”“判斷”和“決策”3?個環(huán)節(jié)提供核心算力支撐。在“觀察”環(huán)節(jié),算力中心需要提供針對不同數(shù)據(jù)類型的存儲支持,包括對傳感器、氣象站結構化時序數(shù)據(jù)的存儲,利用對象存儲或分布式存儲系統(tǒng)支撐遙感數(shù)據(jù)、無人機測繪數(shù)據(jù)的存儲;同時,“觀察”階段的傳感器通過?IoT?海量接入也需要服務端提供算力支撐。在“判斷”環(huán)節(jié),算力中心需要提供多樣化的人工智能處理能力,為農(nóng)業(yè)全要素狀態(tài)判斷與演變模型的構建提供支撐,包括面向海量遙感數(shù)據(jù)、無人機測繪數(shù)據(jù)、伽馬輻射圖譜數(shù)據(jù)、遠中近紅外數(shù)據(jù)反演所需的分布式人工智能訓練,以及針對多用戶的模型訓練等。在“決策”環(huán)節(jié),算力中心需要提供面向知識工程的算力支撐,包括針對知識圖譜構建的大規(guī)模圖計算;在此基礎上,提供面向農(nóng)藝知識與決策推理的推理訓練算力,最終實現(xiàn)農(nóng)業(yè)生產(chǎn)決策方案的輸出。
農(nóng)業(yè)模擬器在黑土地保護中的應用
構建基于第五范式的農(nóng)業(yè)模擬器系統(tǒng),需要將理論、模型、算法與現(xiàn)實農(nóng)業(yè)生產(chǎn)密切結合、驗證并不斷迭代演進。東北地區(qū)是我國機械化程度最高、農(nóng)業(yè)數(shù)字化和信息化發(fā)展最早的區(qū)域之一,具備農(nóng)業(yè)模擬器系統(tǒng)開展試驗示范的多種應用場景。當前,中國科學院(以下簡稱“中科院”)正集合院內(nèi)優(yōu)勢力量組織實施“黑土地保護與利用科技創(chuàng)新工程(黑土糧倉)”戰(zhàn)略性先導科技專項(A?類),中科院計算技術研究所作為大河灣示范區(qū)建設牽頭單位,借助研制的數(shù)字化系統(tǒng)及智能裝備構建了黑土地?OODA?閉環(huán)正反饋系統(tǒng),突破當前孤立、線性、滯后的農(nóng)業(yè)模型缺陷,形成“依靠數(shù)據(jù)決策、智能農(nóng)機執(zhí)行”的農(nóng)業(yè)生產(chǎn)模式,打通數(shù)據(jù)有效流動的環(huán)節(jié),將基于數(shù)據(jù)決策的智能化執(zhí)行的農(nóng)業(yè)生產(chǎn)模式轉化為對黑土地保護和利用的生產(chǎn)力。具體的作用主要體現(xiàn)在?3?個方面。
數(shù)據(jù)觀察環(huán)節(jié)。結合衛(wèi)星與無人機遙感、移動式近地面?zhèn)鞲性O備及固定式傳感器等多種數(shù)據(jù)采集技術,構建空天地一體化、多維度的黑土地作業(yè)全要素觀測網(wǎng)絡,獲取農(nóng)田本地數(shù)據(jù),如土壤(氮、磷、鉀、微量元素含量,以及溫濕度、土壤墑情、電導率等)、氣候(當?shù)氐幕練夂蚯闆r)、水(地下水位、鹽堿度、pH?值等)、生物(歷年的農(nóng)作物種植情況、長勢、病情、蟲情等)、作業(yè)(免耕播種和施肥施藥精度、作業(yè)速度和面積等)的基本信息。前期通過衛(wèi)星遙感實現(xiàn)數(shù)萬畝耕地的大尺度監(jiān)測;確定風險區(qū)域后,使用無人機開展百畝量級的針對性觀測;部分重要區(qū)域布置固定式傳感器開展長期持續(xù)觀測,以實現(xiàn)地塊級的農(nóng)業(yè)信息監(jiān)測。后續(xù)待移動式近地面?zhèn)鞲性O備成熟后,將其安裝在智能農(nóng)機上,使其在作業(yè)的同時采集土壤和作物的多種信息,從而大幅提高信息監(jiān)測的顆粒度精細水平。
數(shù)據(jù)判斷、決策環(huán)節(jié)。根據(jù)算法分析需求,針對采集數(shù)據(jù)開展整理、清洗和融合,以實現(xiàn)對采集數(shù)據(jù)在后續(xù)模型與算法分析中的定性和定量判定。針對黑土地保護,結合地理信息系統(tǒng)(GIS)技術得到區(qū)域內(nèi)土壤侵蝕強度空間分布圖,綜合地區(qū)的土壤侵蝕特征,研究分析在不同的土地利用類型下土壤侵蝕的關系,以及坡度對土壤侵蝕的影響。根據(jù)土壤侵蝕動態(tài)變化、土地利用變化及植被覆蓋度變化情況,建立侵蝕與環(huán)境因子的轉移矩陣并分析相互關系,實時預測土壤侵蝕動態(tài)。針對黑土地作業(yè),面向特定作物通過統(tǒng)計學習、人工智能與復雜系統(tǒng)最優(yōu)化的方法,構建土壤元素、水、肥、溫度、濕度、光照、病、蟲、草等基礎信息模型與作物生長趨勢、災情預警、產(chǎn)量估算之間的數(shù)字化表達和修正模型。通過系統(tǒng)化機器學習與模擬,最終給出針對特定作物不同時期的水、肥、藥、農(nóng)藝等實時處方建議。
作業(yè)執(zhí)行環(huán)節(jié)。一方面,針對現(xiàn)有農(nóng)機裝備進行智能化改造升級;另一方面,突破新一代清潔能源智能農(nóng)機控制芯片、操作系統(tǒng)、無人駕駛、精準控制等核心技術,并綜合集成電機、電池、電控、數(shù)控底盤等技術,創(chuàng)制針對黑土地主要作物的系列(50—400?馬力)清潔能源智能農(nóng)機成套裝備。此外,針對免耕播種、秸稈還田、條耕等保護性作業(yè)關鍵環(huán)節(jié),提高農(nóng)機農(nóng)藝結合水平,強化農(nóng)機裝備傳感器與智能變量作業(yè)農(nóng)機具的集成應用。具備智能網(wǎng)聯(lián)、無人駕駛和一定自主決策能力的智能農(nóng)機,不僅可按照作業(yè)命令實現(xiàn)針對具體作物“耕、種、管、收”全生命周期的精準高效保護性作業(yè),同時還能實時采集土壤和作物信息,以及深耕深松、精量播種、變量施肥施藥等作業(yè)質(zhì)量信息,然后通過智能?OODA?環(huán)開展在作業(yè)任務自動分配、農(nóng)機智能調(diào)度、農(nóng)機作業(yè)質(zhì)量指導等方面的迭代優(yōu)化。
挑戰(zhàn)與對策
科學技術的進步為農(nóng)業(yè)生產(chǎn)提供了新的手段,在研究黑土地“用好”“養(yǎng)好”的過程中,需要利用好現(xiàn)代信息技術手段。通過智能?OODA?環(huán)為農(nóng)業(yè)建立全要素的模擬器提供了新的科學研究方法,也為黑土地保護提供了新的思路。但是,建立農(nóng)業(yè)模擬器是一個基于信息技術、橫跨多個學科的工程,尤其要注重對黑土地成因、破壞過程、保護機制、農(nóng)藝過程在信息空間的建模。為了能夠在中科院戰(zhàn)略性先導科技專項“黑土糧倉”中實現(xiàn)信息技術引領的黑土地保護模式,本文提出?3?點建議。
強化跨學科協(xié)同。農(nóng)業(yè)模擬器要在黑土地保護中發(fā)揮作用,需要將已有的保護性耕作技術,以及土壤、微生物、環(huán)境等要素在信息空間進行建模,通過海量實時數(shù)據(jù)的采集,在信息空間完成模型的迭代訓練。目前,不同的黑土地保護科研團隊分別專注于各自的領域,形成了各自領域的保護模型,但是這些模型還屬于基于傳統(tǒng)科研范式的模型,在后續(xù)需要加強互相之間的高質(zhì)量合作,以實現(xiàn)信息與農(nóng)學、土壤學、生物學的學科融合,形成完備的農(nóng)業(yè)模型。
強化黑土地保護數(shù)據(jù)價值挖掘。數(shù)據(jù)流的采集需要大量的資金投入,但由于農(nóng)業(yè)生產(chǎn)與第二、第三產(chǎn)業(yè)相比投入產(chǎn)出比較低,很容易導致數(shù)據(jù)價值得不到體現(xiàn)而限制了信息化建設資金的供給。盡管近些年來國家加大了對農(nóng)業(yè)信息化建設的投入,并取得了一定的成績,但是始終依靠國家投入并不是長久之計。因此,未來我們需要開展商業(yè)化的運營,在數(shù)據(jù)流的快速流動中實現(xiàn)數(shù)據(jù)價值的變現(xiàn),并更好地投入到智能?OODA?環(huán)的循環(huán)迭代中。
針對黑土地保護建設科學裝置。新的研究范式、新的技術手段、新的科研裝置都是加快科研成果產(chǎn)出的利器。黑土地保護需要建設一個全要素的農(nóng)業(yè)模擬器研究與開發(fā)平臺,然后基于該平臺實現(xiàn)傳統(tǒng)保護模型的數(shù)字化,并通過數(shù)據(jù)訓練這些模型以接近農(nóng)業(yè)生產(chǎn)實際。這就需要將面向黑土地保護的農(nóng)業(yè)模擬器視為黑土地保護的科學裝置,為黑土地保護提供“體檢報告”,指導黑土地保護措施的實施。
(作者:孫凝暉、張玉成、劉子辰、陳海華、譚光明,中國科學院計算技術研究所;王竑晟 中國科學院科技促進發(fā)展局;《中國科學院院刊》供稿)